URDF to Mujoco Converter
Utility for converting from URDF format to Mujoco format
urdf2mjcf is a tool for converting URDF models to Mujoco XML.
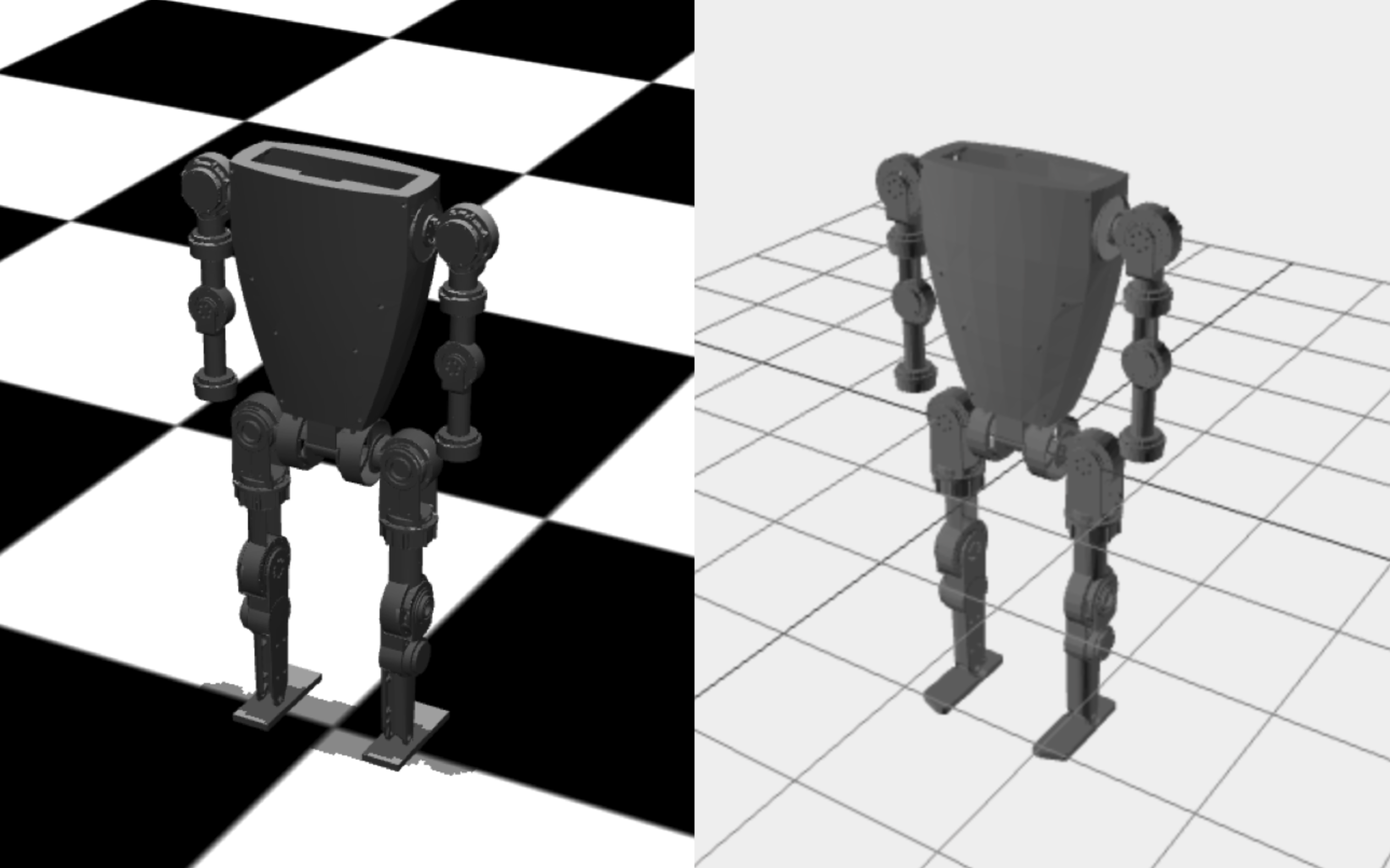
Here is an example, with the input URDF on the right and the output MJCF on the left:
Installation
You can install the package using pip:
pip install urdf2mjcfUsage
Command Line
To run the conversion script from the command line, use:
urdf2mjcf path/to/your/robot.urdfThis will save the MJCF file in the same directory as the URDF file.
To see all the options, use:
urdf2mjcf -hAs of urdf2mjcf==0.2.16, the options are:
usage: urdf2mjcf [-h] [--output OUTPUT] [--copy-meshes] [--metadata METADATA] [--metadata-file METADATA_FILE] urdf_path
Convert a URDF file to an MJCF file.
positional arguments:
urdf_path The path to the URDF file.
options:
-h, --help show this help message and exit
--output OUTPUT The path to the output MJCF file.
--copy-meshes Copy mesh files to the output MJCF directory.
--metadata METADATA A JSON string containing conversion metadata (joint params and sensors).
--metadata-file METADATA_FILE
A JSON file containing conversion metadata (joint params and sensors).Python
To run the conversion script from Python, use:
from urdf2mjcf import run
run(
urdf_path="path/to/your/robot.urdf",
mjcf_path="path/to/save/robot.mjcf",
copy_meshes=True,
)Updated 6 months ago