K-OS
Overview of the K-Scale Operating System architecture
The K-Scale Operating System combines the hardware, software and firmware for K-Scale's general-purpose robots. To install the Python client for interacting with the OS, run the following command:
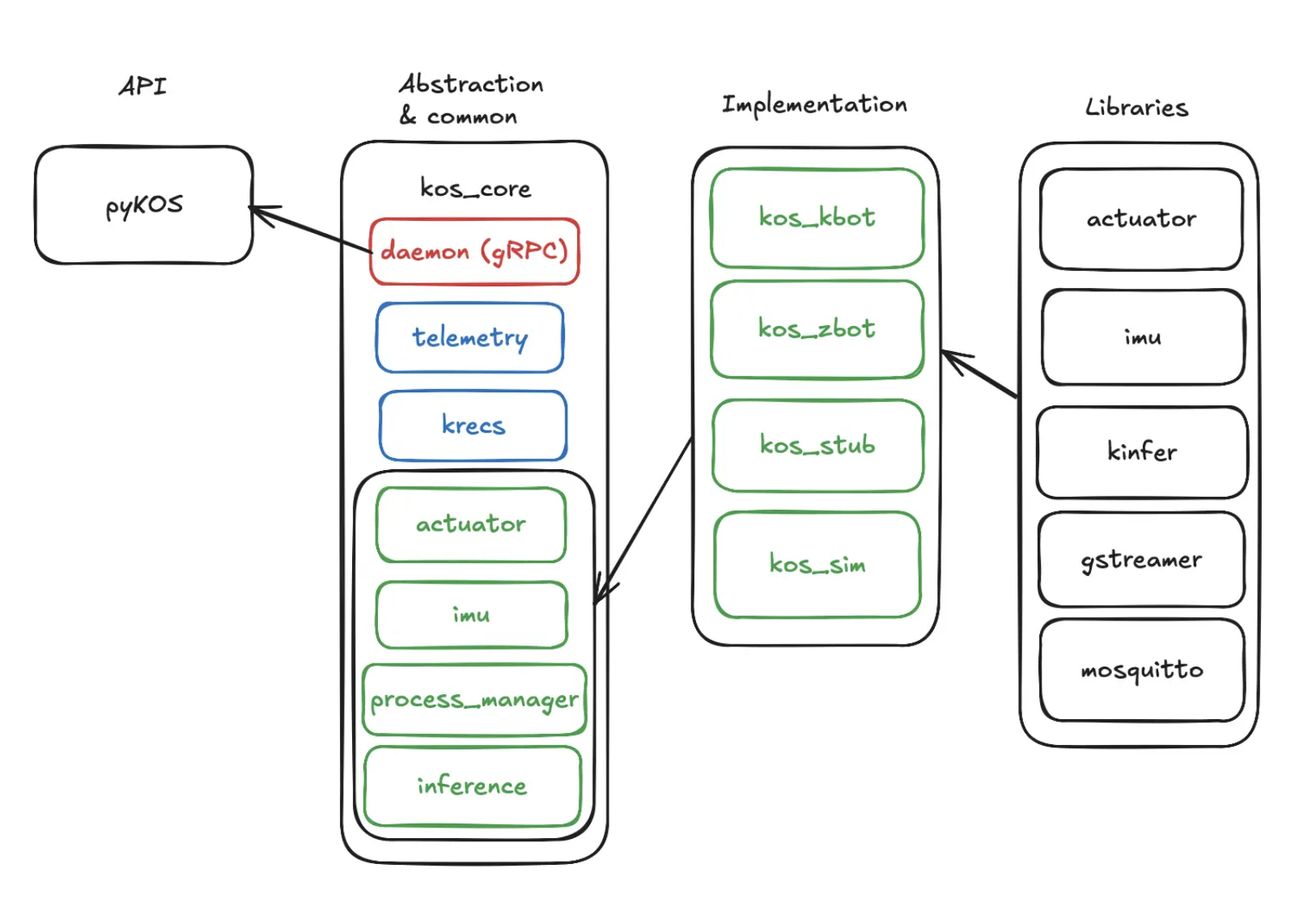
pip install pykosHere is a high-level overview of the K-Scale OS architecture.
KOS Setup
-
Clone the kos-kbot library onto the robot head's compute
git clone https://github.com/kscalelabs/kos-kbot.git -
Setup Rust Cargo etc. on the Raspberry Pi
-
Edit the
/src/lib.rsfile to remove the leg actuator id if they are not presenthttps://github.com/kscalelabs/kos-kbot/blob/00fea353dd058a4d84c6897bfc27fde92c165f6e/src/lib.rs#L370
-
Start the server with
cargo run --releaseyou can now use pykos. If running pykos on a different device, make sure the ip is pointed to the right one. By default, it uses0.0.0.0ie localhost (same device).
Updated 4 months ago