Hardware Overview
Open-source robotics dev kit & platform for builders.
Zeroth Bot is an open-source humanoid robot development platform designed for developers and researchers, made for advanced ML and software applications development.
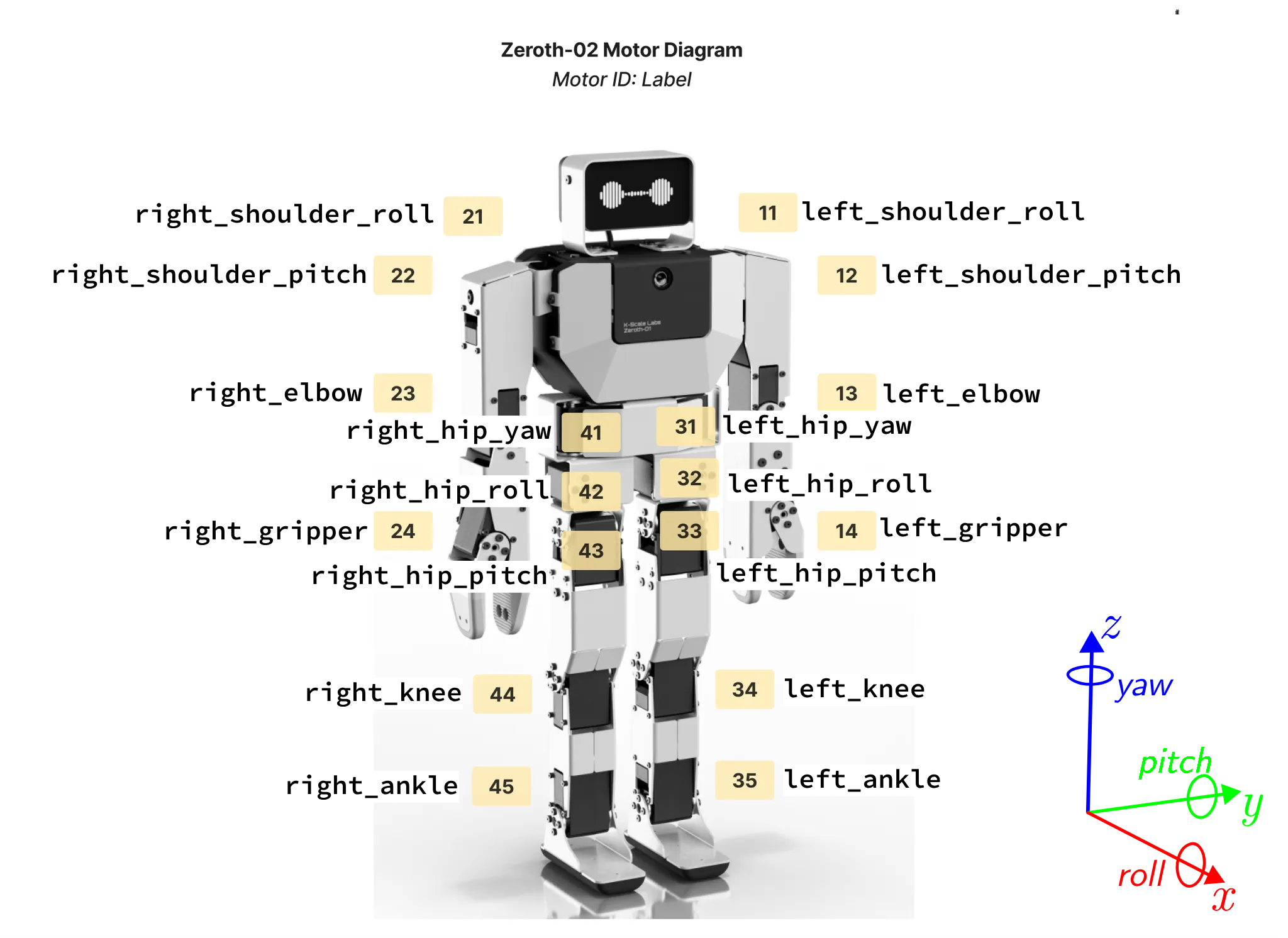
Joint Motors
Robot Composition
The Zeroth Bot consists of head, torso, arms, and legs, with total 16 DoFs, allowing for flexible movement and control:
- Each arm has 3 DoF
- Each leg has 5 DoF
- Battery, IMU, camera, microphone, and speaker are installed in the torso
Robot Functions (coming soon)
- Omnidirectional walking
- Supports forward, backward, and lateral walking
- Supports rotation and complex walking
- Disturbance Resistance While Walking
- Can walk on uneven surfaces
- Can withstand certain impact disturbances while walking
- Predefined Actions
- Waving
- Safety Protection
- Automatically enters damping model in uncontrolled states to prevent damage
- Hard emergency stop
- Soft emergency stop
Robot Specifications
| Type | Specification Parameters | Description |
|---|---|---|
| Basic Parameters | Height (when standing upright) | 48cm |
| Weight | 3.6kg | |
| DoFs | Total DoFs | 16 |
| Single Leg DoFs | 5 | |
| Single Arm DoFs | 3 (expandable) | |
| Operational Parameters | Walking Speed | |
| Turning Speed | ||
| Battery Parameters | Battery Life | 20 Minutes |
| Charging Time | ≤ 2h | |
| Cycle Life | ||
| Computing Platform | CPU | RISC-V 0.5 Tops (Extensible to 26 TOPS with AI Backpack) |
| Actuators | Torque | 30kg.cm |
| Speed | 60RPM | |
| Sensors | Camera | 1080p Camera |
| Microphone | Electret microphone | |
| Speaker | 3W Speaker | |
| IMU | 6-axis sensor | |
| Safety Function | Robot Emergency Stop | 1 |
| Auditory Alerts | Low Battery Alert, Joint Overheat Alert | |
| Communication Methods | Wireless Connections | WIFI 6 |
| GPRC |
Updated 9 days ago